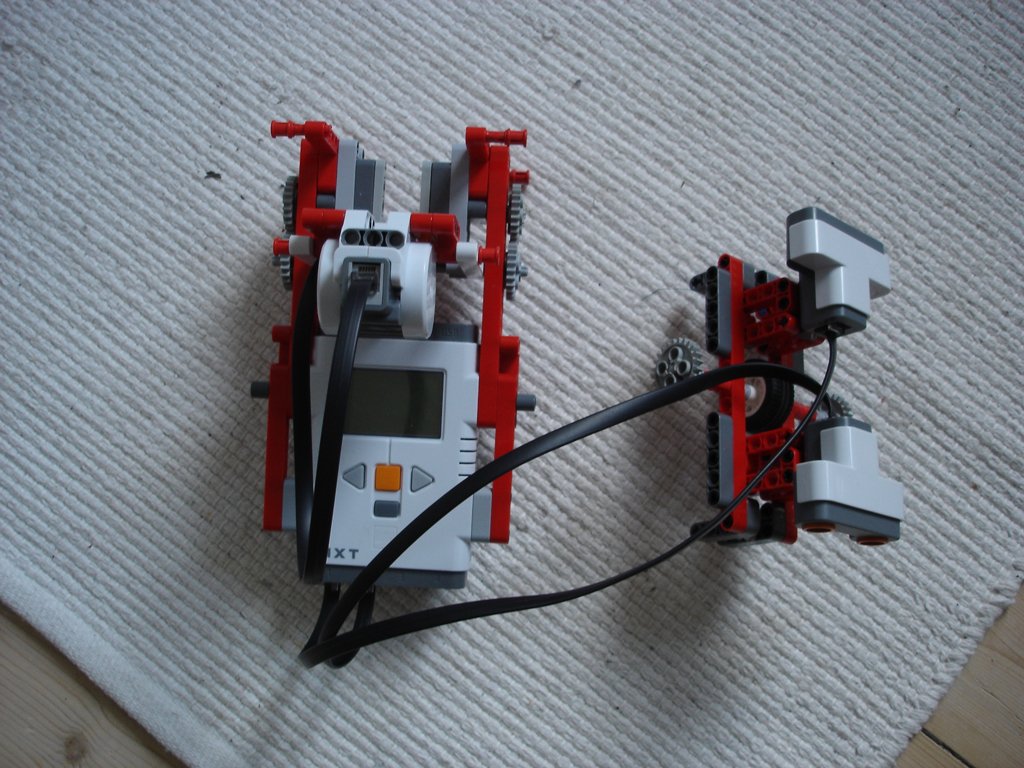
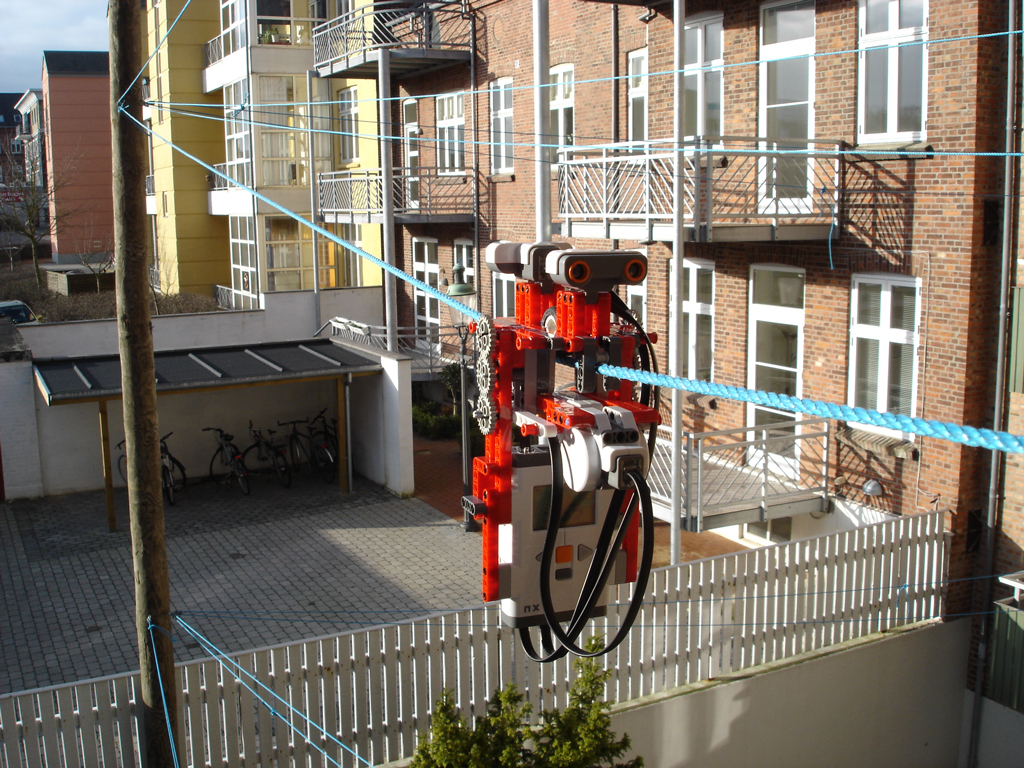
My backyard was filled with clotheslines, so I decided to create an aerial ropeway that could measure the length of a rope. The ropeway has two ultra-sonic sensors – one for each direction. This allows the ropeway to stop before it hits an object. The ropway is controlled from a PC with the Bluetooth aerial ropeway remote. Below you will find a description of the remote as well as building instructions for building your very own aerial ropeway.
Aerial ropeway remote
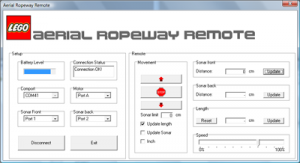
The Aerial ropeway remote is a Bluetooth remote written in C++ using Borlands C++ builder. With the remote it is possible to measure and view how far the robot has moved. This can be viewed in either centimetres or inches. From the remote it is also possible to set a sonar limit – so the aerial ropeway stops before it hits an object. If this value is set to zero you can move the robot manually using the two movement-buttons. The speed of the motor as well as the input and output ports can also be selected from the remote. Please note that updating sensors over Bluetooth involves latency – so updating both the length and sonar sensor will slow down the refresh rate and therefore the precision of the sonar limit (i.e. how close the robot gets to the object).
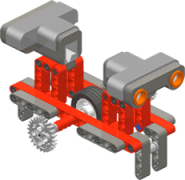
Building instructions
Below you will find building instructions for building the Aerial Ropeway. Click on the links and a pop-up window with the instructions will appear. Alternatively you can download the Ldraw-files using the download link. The building instructions where made with LDraw,MLCad,LPub and POV-Ray.


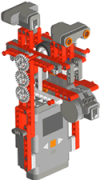
Follow