 |
MonoBrick EV3 Firmware
|
|
MonoBrick EV3 Firmware
|
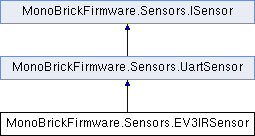
Class for the EV3 IR sensor More...
Public Member Functions | |
| EV3IRSensor (SensorPort port) | |
| Initializes a new instance of the MonoBrick.EV3.IRSensor class. More... | |
| EV3IRSensor (SensorPort port, IRMode mode) | |
| Initializes a new instance of the MonoBrick.EV3.IRSensor class. More... | |
| override string | ReadAsString () |
| Reads the sensor value as a string. More... | |
| int | Read () |
| Read the sensor value. The returned value depends on the mode. Distance in proximity mode. Remote command number in remote mode. Beacon location in seek mode. More... | |
| int | ReadDistance () |
| Read the distance of the sensor in CM (0-100). This will change mode to proximity More... | |
| byte | ReadRemoteCommand () |
| Reads commands from the IR-Remote. This will change mode to remote More... | |
| BeaconLocation | ReadBeaconLocation () |
| Gets the beacon location. This will change the mode to seek More... | |
| override string | GetSensorName () |
| Gets the name of the sensor. More... | |
| override void | SelectNextMode () |
| Selects the next mode. More... | |
| override void | SelectPreviousMode () |
| Selects the previous mode. More... | |
| override int | NumberOfModes () |
| Numbers the of modes. More... | |
| override string | SelectedMode () |
| .m.-, More... | |
 Public Member Functions inherited from MonoBrickFirmware.Sensors.UartSensor Public Member Functions inherited from MonoBrickFirmware.Sensors.UartSensor | |
| UartSensor (SensorPort port) | |
Properties | |
| IRMode | Mode [get, set] |
| Gets or sets the IR mode. More... | |
| IRChannel | Channel [get, set] |
| Gets or sets the IR channel used for reading remote commands or beacon location More... | |
| Properties inherited from MonoBrickFirmware.Sensors.UartSensor | |
| UARTMode | uartMode [get, set] |
| SensorPort | Port [get] |
| Properties inherited from MonoBrickFirmware.Sensors.ISensor | |
| SensorPort | Port [get] |
| Sensor port More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from MonoBrickFirmware.Sensors.UartSensor | |
| void | Reset () |
| byte[] | GetSensorInfo () |
| Gets the sensor info based on the mode More... | |
| bool | Initialise (UARTMode mode) |
| bool | SetMode (UARTMode mode) |
| byte | ReadByte () |
| byte[] | ReadBytes (int length) |
| Protected Attributes inherited from MonoBrickFirmware.Sensors.UartSensor | |
| const int | NumberOfSensorPorts = SensorManager.NumberOfSensorPorts |
| SensorPort | port |
Class for the EV3 IR sensor
|
inline |
Initializes a new instance of the MonoBrick.EV3.IRSensor class.
|
inline |
Initializes a new instance of the MonoBrick.EV3.IRSensor class.
| mode | Mode. |
|
inlinevirtual |
Gets the name of the sensor.
Implements MonoBrickFirmware.Sensors.UartSensor.
|
inlinevirtual |
|
inline |
Read the sensor value. The returned value depends on the mode. Distance in proximity mode. Remote command number in remote mode. Beacon location in seek mode.
|
inlinevirtual |
Reads the sensor value as a string.
Implements MonoBrickFirmware.Sensors.UartSensor.
|
inline |
Gets the beacon location. This will change the mode to seek
|
inline |
Read the distance of the sensor in CM (0-100). This will change mode to proximity
|
inline |
Reads commands from the IR-Remote. This will change mode to remote
|
inlinevirtual |
|
inlinevirtual |
Selects the next mode.
Implements MonoBrickFirmware.Sensors.UartSensor.
|
inlinevirtual |
Selects the previous mode.
Implements MonoBrickFirmware.Sensors.UartSensor.
|
getset |
Gets or sets the IR channel used for reading remote commands or beacon location
The channel.
|
getset |
Gets or sets the IR mode.
The mode.
 1.8.3.1
1.8.3.1